智能巡检软件是搭载在智能巡检机器人上核心软件系统,采用通用的MQ接口进行封装,接口协议开放,并支持与上级平台对接。
智能巡检软件主要由巡检引擎、识别引擎、实时3D仿真引擎、运动控制引擎等主要核心功能模块组成。
>> 巡检引擎
机器人的基本功能之一,通过web页面建立巡检任务,来使机器人按照要求完成相应的巡检。巡检任务的执行方式可以设置为:立即,定时和周期,如下图所示。

自定义名称:需要用户自己手动输入。
执行方式:
● 立即:巡检任务审批通过后,机器人自动开始执行巡检任务,任务完成后机器人回到零位。
● 定时:巡检任务审批通过后,机器人不会立即执行巡检任务,而是等到设定的具体时间开始执行任务,任务完成后机器人回到零位。
● 周期:巡检任务审批通过后,机器人不会立即执行巡检任务,而是等到设定的具体时间开始执行任务,与定时任务不同,周期任务不会执行一次就完结,而是会根据设定的周期时间间隔循环的执行下去,直到手动停止任务。
监测单元:可以设置全部或自定义,同时支持按照检测类型选择需要巡检的检测点,所有的检测点在右侧显示栏显示,支持自定义选择检测点。
>> 识别引擎
机器人对站点环境中所需要检测的属性进行图像拍照,通过系统中检测类型的算法来做匹配,进行识别。系统中的检测类型有很多种,指针表,旋钮开关,指示灯,数码管,闸刀开关,OCR等几十种检测类型,如下图所示。
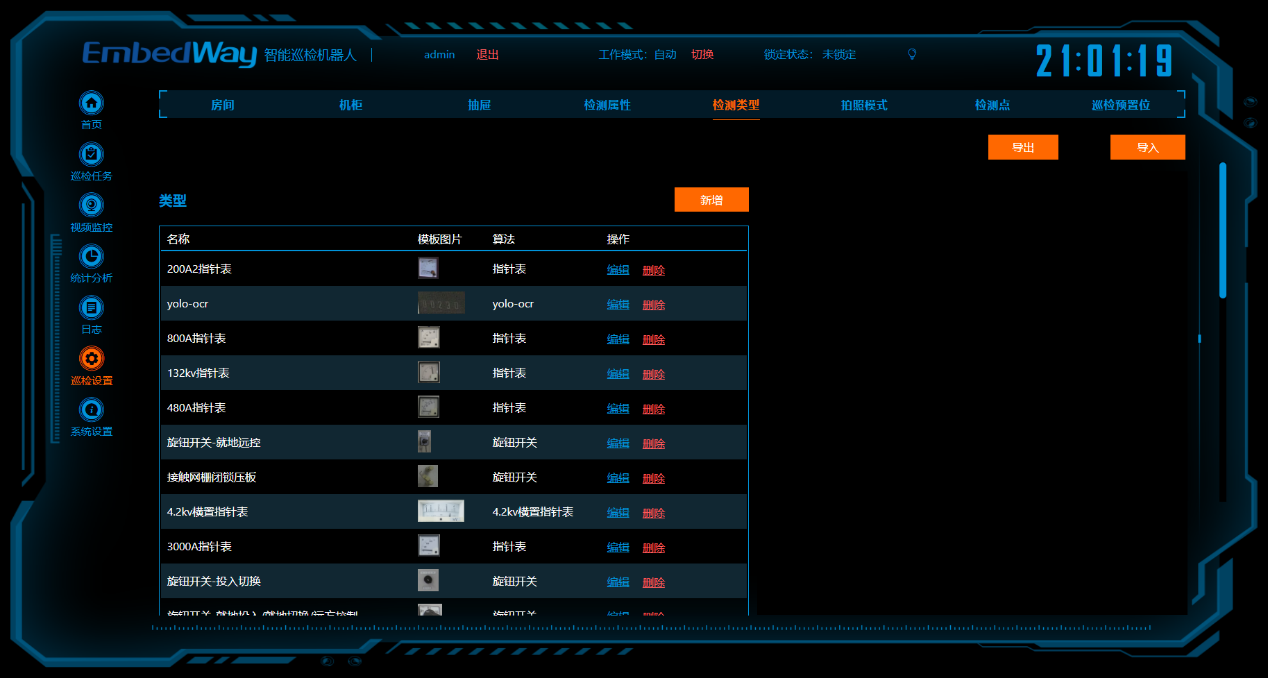
机器人目前包含的主要检测类型如下,如果后续有新的检测类型,可以通过后台数据库添加。
针对正常照度和低照度等不同的场景,引擎内置不同的拍照模式,确保最终的识别率。

>> 实时3D仿真引擎
机器人内置三维站点地图,可对接客户方BIM模型,实时、真实地还原机器人在现场的运行情况和状态。
站点地图支持图形化界面操作,简单易用,方便上手。

>> 运动控制引擎
机器人在站内进行巡检,识别准确的重要先决条件就是定位精准,运动控制引擎通过核心算法,保证水平、垂直运动定位精度在2mm以内。
为保证机器人长时间稳定运行,降低机械结构在启动和刹车时受到的冲击,运动控制引擎支持梯形曲线、S形曲线、PID算法等多种起停策略,让用户可以针对性地选择更加适合使用场景的模式。

若有更多咨询,或致电热线400-009-4966。








